

Robotic Cheetah Built By Dutch Researcher To Increase Robots’ Energy Efficiency
When it comes to robotics, the animal kingdom is always a source of inspiration and biomimicry is an extremely common phenomenon. After making robot versions of animals as varied as an octopus, an African primate called galago and a bat in the past 11 months alone — always with the purpose of fine-tuning our machines — researchers have now turned to the world’s fastest land animal, the cheetah.
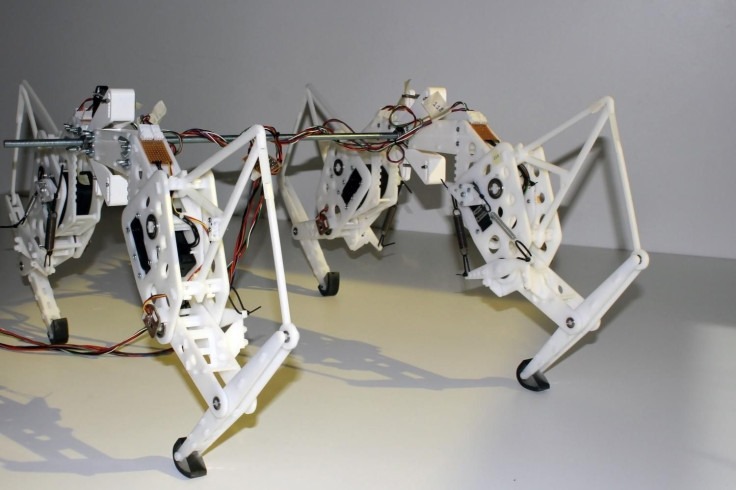
Geert Folkertsma from the University of Twente in the Netherlands built a scaled-down version of the cheetah for his doctoral thesis. Adjusting for scale, the robot uses about 15 percent more energy than a real cheetah, which is very efficient, energy-wise. It weighs about 2.5 kilograms (5.5 pounds) and measures about 30 centimeters (one foot) long, and can travel at the speed of 1 kilometer (0.6 miles) an hour.
Read: Bird Flight Shows Flaws In Design Of Flying Robots
In a statement on the university’s website, Folkertsma explained: “As you might expect of the fastest land animal in the world, the cheetah makes very efficient use of its energy. I wanted to create a robot that runs the same way, with the aim of applying this knowledge to the development of new robots. … By applying knowledge about the movement patterns of the cheetah, you can develop robots that walk more elegantly and above all efficiently.”
The researcher spent four years studying extensive video footage of cheetahs and developing his robot. Folkertsma realized that the animal’s backbone could bend and extend, making its movements a lot more efficient than any existing robot. He also found cheetahs to store a lot of energy in the muscles. He reproduced both these effects in his robot using careful placement of springs, so that the robot has the same spine, shoulder and hip positions as the animal.
However, Folkertsma’s cheetah is not really like a cheetah in other ways.
“A real cheetah not only runs, but also climbs trees for example. That is not something our robot needs to copy. After all, the aim was not to reconstruct a cheetah, but to reap the rewards of its efficient way of running,” he explained.
© Copyright IBTimes 2025. All rights reserved.
- MOST POPULAR IN Technology

















